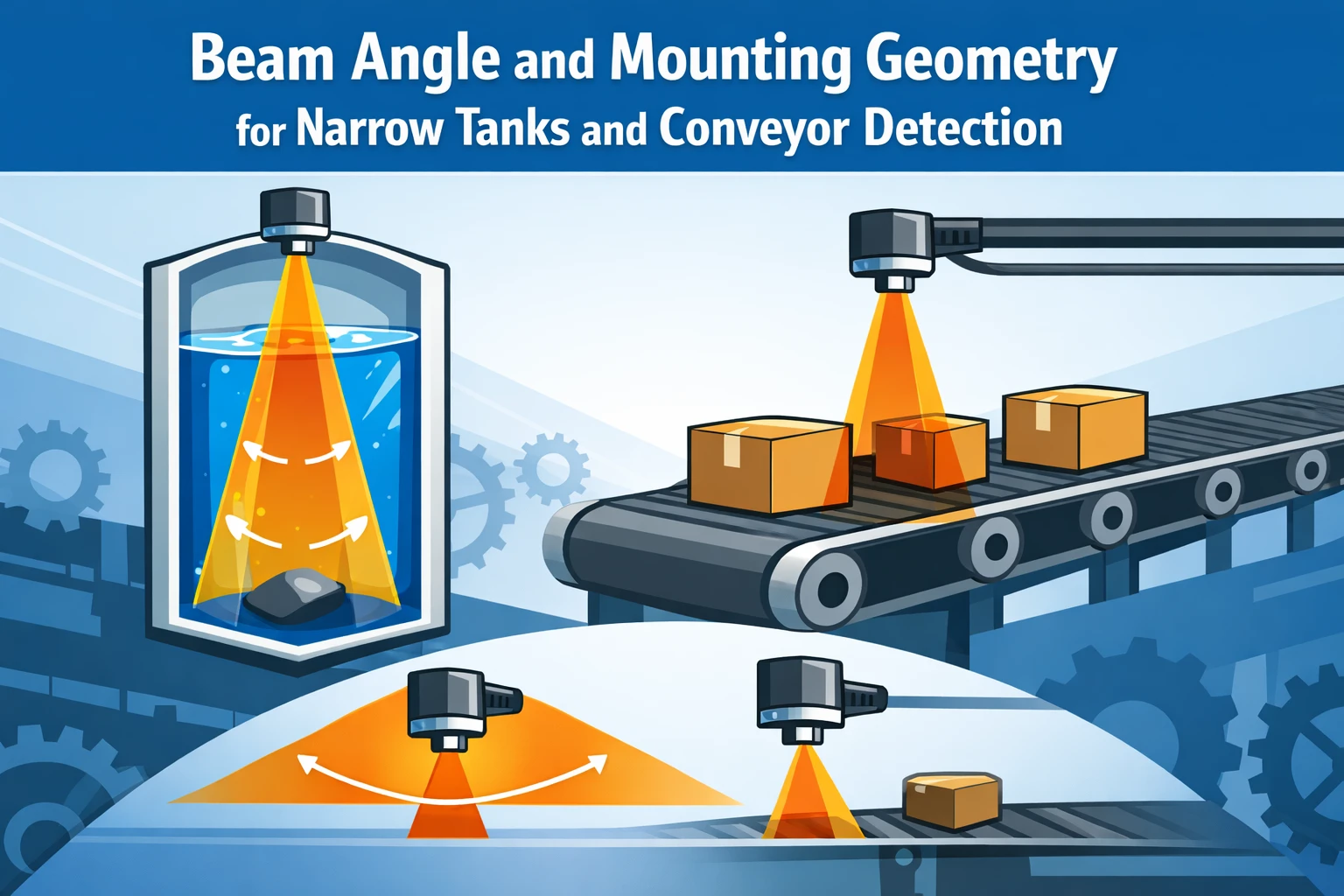
狭いタンクとコンベヤ検出のためのビーム角度と取り付け形状
紙の上では距離が正しいように見えても、多くの超音波センサー プロジェクトは失敗します。選択したモデルはターゲットに到達でき、PLC は正しく配線され、ベンチ テストは問題なく行われたように見えますが、インストールされたシステムでは依然として不安定な読み取り値や誤ったスイッチングが生成されます。これらのケースのほとんどでは、実際の問題はジオメトリにあります。
ビーム角度、壁クリアランス、ノズルの深さ、ブラケットの剛性、およびターゲットの幅によって、設置後に音響経路が制御下にあるかどうかが決まります。狭い水槽では、エコーが液面から戻る前に側壁をクリップする可能性があります。コンベア上では、ビームが意図したターゲットではなく、サイド レール、隣接するレーン、または振動するブラケットに引っかかったときに、同じ幾何学的な間違いが発生します。異なるアプリケーションでも同じ統合が失敗します。
この記事は、 センサー製品ハブ、コア MU30センサー、そして、 超音波トランスデューサーのサプライヤーページ。一般的な M18 と M30 の比較を繰り返すものではなく、第一原理からブラインドゾーン理論を再実行するものでもありません。その役割は、サンプルの承認前にビーム角度と取り付け形状をどのようにスクリーニングする必要があるかを示すことです。
問題のコンテキスト
超音波センシングは、目的のターゲットまでの距離だけでなく、エコー経路全体の制御に依存しているため、「範囲が一致した」設置でも失敗する可能性があります。狭い容器や限られた機械フレームでは、センサーは 1 つの表面とのみ相互作用しません。壁、ノズルリップ、蓋、スタンドパイプ、レール、ガード、ローラーエッジ、および有効ビームフットプリント内に収まるほど近くにあるあらゆる硬い物体と相互作用します。
狭いタンクでは、充填レベルによって形状が変化するため、この問題は特にコストが高くなります。タンクの上部付近では、ノズルと上壁が最も強力な反射体になる可能性があります。底部付近では、ブラインド ゾーンと壁の収束により、使用可能なマージンが崩れる可能性があります。その結果、ある動作点では許容できるように見える測定値でも、起動時、空に近い動作時、または最終充填段階でのみ信頼性が低くなる可能性があります。
コンベヤ検出は最も明確な類似点です。容器内の側壁の反射は車線のサイドレールの反射になり、同じジオメトリ ロジックが依然として適用されます。
なぜ範囲だけが誤った信頼を生み出すのか
チームは、距離ウィンドウをカバーする最初のサンプルを購入することがよくあります。アプリケーションで 600 mm ~ 1800 mm が必要な場合、彼らは 2 m または 4 m に達するモデルを選択し、問題は解決されたとみなします。このショートカットでは、3 つの決定的な問題が無視されています。つまり、作動距離での実効音響フットプリントがどのくらい大きくなるか、近くのハード反射体がメイン ローブにどのくらい近いか、センサーが独自のブラインド ゾーンまたは使用不可能なエリアの近くで動作する必要があるかということです。
それが、この記事がジオメトリ優先である理由です。コンベア固有のフォームファクター間の比較が必要な場合は、次を使用します。 専用の M18 対 M30 コンベア ガイド。最小検出距離とリングダウン動作が主な関心事の場合は、次を使用します。 ブラインドゾーンの技術記事。ここでの目的は、パラメータ調整を開始する前に、設置ジオメトリ自体が実行可能かどうかを判断できるようにすることです。
ジオメトリ主導の失敗の典型的な症状
- 安定しているが距離が間違っています: センサーはターゲットではなく壁、ノズルエッジ、レール、または固定ブラケットにロックされます。
- 断続的なスイッチング: わずかな機械的ミスアライメントや振動により、ビームは目的のターゲットと近くの硬質反射体の間で移動します。
- 高レベルまたは低レベル付近でのみ失敗: レベルが設置境界に近づくにつれて、タンクの形状は音響的に厳しくなります。
- 大きなオブジェクトでは機能しますが、狭いターゲットでは失敗します。 有効ビーム フットプリントがターゲットより広いか、周囲の構造物に漏れます。
- 説明のつかないサンプルの不一致: 1 つの設置は機能しますが、別の設置は機能しません。これは、試行間で電子機器ではなく取り付け形状が変更されたためです。
エンジニアリング上の制約
モデルを選択する前に、狭いタンクやコンベアのアプリケーションを妨げる可能性が最も高い形状変数をロックしてください。これにより、チームが不完全な RFQ を送信し、ソフトウェア フィルタリングを使用して機械的なレイアウトの問題を解決しようとすることが防止されます。
1) ビーム角度は単独ではなく、タンクの直径に対して読み取る必要があります
データシートに印刷されているビーム角度は、それ自体では意味がありません。重要なのは、そのビームが実際のスタンドオフ距離にわたってどのように拡大するかです。狭い円筒形のタンクでは、特にセンサーが最大充填レベルよりも高い位置に取り付けられている場合、またはノズルの内側に取り付けられている場合、適度な円錐であっても中心線が液面に達する前に壁と交差する可能性があります。壁が有効設置面積に入ると、システムは 1 つのクリーンなエコー パスを評価しなくなります。
これが、中距離戦車の設置がしばしば自然の周囲に着地する理由です。 MU30に代表される中距離戦車センサークラス。現在の製品ページは 200 ~ 6000 mm の広い動作範囲をカバーしており、コンテナやサイロに柔軟性を与えますが、その柔軟性はタンクの直径と取り付け高さによって考慮する必要があります。このモデルは間違いではありません。スクリーンされていないジオメトリは次のとおりです。
2) ノズルとスタンドパイプの形状により、プロセス表面よりも強いエコーが発生する可能性があります
深いノズルは、意図しない音響トンネルのように動作する可能性があります。ビームは開いたヘッドスペースに発射されるのではなく、まずノズルの壁、リップ、または内部の継ぎ目と相互作用します。実際には、これにより、制御システムにとっては信頼しやすく、試運転チームにとっては診断が難しい、一見安定したエコーが生成される可能性があります。直立管でも、直径が小さすぎる場合、内部が粗い場合、またはセンサーの軸が中心にない場合に、同じ問題が発生します。
調達および設置の検討のために、ノズル直径、ノズル高さ、センサー凹部の深さ、およびパイプ内部が滑らかか段付きかどうかを収集します。これらの値が欠落している場合、電気仕様がどれほど詳細であっても、見積もりは不完全になります。
3) ブラインドゾーンと最小測定可能レベルは一緒にスクリーニングする必要があります
2 番目のジオメトリの間違いは、ブラインド ゾーンを取り付けレイアウトとは別のトピックとして扱っていることです。彼らも同じ決断だ。アプリケーションが浅い容器の上部付近やヘッドスペースがほとんどない容器内で信頼性の高い読み取りを必要とする場合、測定ウィンドウが完了する前にセンサーが使用不可能な領域に近づく可能性があります。その時点で、システムの精度が低下するだけではありません。信頼性の高い検出が保証されなくなった領域で動作しています。
そこが コンパクトMU18オプション が貴重になります。その短距離設計と小さなブラインドゾーンプロファイルは、汎用の中距離ユニットよりもはるかに近接設置状況に適合します。アプリケーションが非常に厳しいクリアランスを要求する場合、正しい質問は「MU30 を調整して動作させることができますか?」ではありません。 「最初からジオメトリをMU18に割り当て直すべきでしょうか?」
4) コンベアのレーン幅とサイド レールにより、屋外で同じジオメトリの矛盾が生じる
コンベア上では、形状エラーがより目に見える形で現れます。センサーが狭いレーンの上にあまりにも高く取り付けられている場合、有効設置面積によってレール、ガイド プレート、または隣接する製品が挟まれる可能性があります。ターゲットが柔らかい、不規則な、または予想より小さい場合、レールは実際に検出したいカートン、トレイ、または部品よりもきれいなエコーを返す可能性があります。そのため、コンベア アプリケーションは戦車の作業に役立つメンタル モデルです。どちらの場合も、近くの構造物を有用なビーム フットプリントから遠ざけることが重要です。
高速レーンや物理的に狭いレーンでは、狭い通路で狙いを定めるのが容易なため、モデルの選択は MU18 に移る可能性があります。より長いスタンドオフまたはより大きなターゲット領域の場合でも、MU30 は依然として良好に機能しますが、これは取り付けレビューの一部としてレーン幅、レール距離、およびターゲット寸法がスクリーニングされた場合に限られます。
5) ブラケットの剛性はセンサーの位置合わせと同じくらい重要です
適切に狙いを定めたセンサーでも、振動が始まると不適切なセンサーになる可能性があります。長いカンチレバー ブラケット、薄い L プレート、およびサポートされていないスタンドオフにより、機械的な動きが生じ、エコー パスがサイクルごとに変化します。タンク内では、この動きによってビームが壁またはノズルの端に向かって移動します。コンベア上では、ビームをレールに向かって動かしたり、狭いターゲット ウィンドウから遠ざけたりします。結果として生じる誤ったスイッチングは、根本原因が機械的共振である場合、信号ノイズが原因であることがよくあります。
取り付けハードウェアを感知システムの一部として扱います。ブラケットが柔軟な場合、紙上のビーム角度は使用中のビーム角度ではなくなります。 2 点サポート、短いスタンドオフ、および剛性の高いブリッジ スタイルのマウントは、通常、設置後にフィルターを調整するよりも優れた現場安定性をもたらします。
6) 公称ビーム角度は有効な検出フットプリントと同じではありません
この区別が、多くの資格プロジェクトが失敗する場所です。公称ビーム角度は通常、制御された条件下で定義され、すべての実際のターゲット、すべての材料、または近くのすべての干渉源を表すわけではありません。有効な検出フットプリントは、ターゲットのサイズ、ターゲットの反射率、表面形状、取り付け距離、環境ノイズによって変化します。言い換えれば、工場やタンクファームで重要な設置面積は、カタログ値から想像した設置面積よりも広い可能性があります。
したがって、エンジニアリング ルールは保守的なスクリーニングとなります。幾何学形状が紙の上ではかろうじて許容できるように見えても、通常は現場では許容できません。意図したターゲットゾーンと近くのハードリフレクターの間にマージンを残してください。マージンが存在しない場合は、サンプルの承認前に、別のモデルを選択するか、スタンドオフを減らすか、ブラケットを再設計してください。
選択マトリックス
サンプルを比較する前に、次のマトリックスを使用して、ジオメトリ制約をモデルと取り付けの決定に変換します。
| シナリオ | メイン ジオメトリのリスク | 優先される取り付けルール | 推奨モデル | 実装メモ |
|---|---|---|---|---|
| 適度なスタンドオフを備えた狭い円筒形タンク | 表面エコーが支配的になる前の側壁クリッピング | センサーを中心に保ち、空の最大距離に十分な壁マージンを残してください | MU30 | タンクが極端に浅くなく、取り付け軸が安定している場合に最適です |
| ノズル付きタンクまたはスタンドパイプ | ノズルリップまたはパイプ壁が初期の偽エコーを生成する | 見積もり前に凹みの深さを最小限に抑え、ノズル直径を検証してください | MU30 または SR55 | 高さと側壁の拒絶マージンが汎用ユニットの快適ゾーンを超える場合は、SR55 に移行します |
| 最低レベルに近い浅いビン | ブラインドゾーンが必要な測定ウィンドウと重なっています | スタンドオフを減らし、最大範囲よりも短い使用できないエリアを優先します | MU18 | センサーがターゲットの近くで動作する必要がある場合、追加の射程容量よりもコンパクトな形状が重要です |
| サイドレール付き細幅コンベヤ | レールは製品よりも強いエコーを返します | ターゲットの干渉に入らないように、できるだけ低く中央に取り付けます | MU18 | レーン幅とスタンドオフ マージンの両方が明らかに適切な場合にのみ MU30 を使用してください |
| 混合ターゲット幅と保護された取り付けスペースを備えたコンベヤ | 可変反射率と可動ブラケットの位置合わせ | 堅固な取り付けを使用し、実際の最小ターゲットでの設置面積を確認します | ウルトラノヴァ2 または MU30 | UltraNova2 は、円筒形の汎用ボディよりもコンパクトで保護された設置が重要な場合に役立ちます |
サンプル承認前のフィールド形状チェック
- 近くのハードリフレクターをマップします: の壁、ノズル エッジ、レール、ガード、ブラケットは、設置を開始する前にリストに記載する必要があります。
- 最小作動距離と最大作動距離をマークします。 は、1 つの中間点だけを使用してサンプルを認定することはできません。
- 最小の実際のターゲットを確認します: フットプリントが大きな平らなプレート上でのみ証明される場合、裁判は不完全です。
- 取り付け剛性を検査します: ブラケットが目に見えて動く場合、テスト結果は承認できるほど安定していません。
- 中心から外れたケースを検証する: 実際のターゲットとフィル サーフェスは、常に完全に中心にあるとは限りません。
- 写真と寸法とともにジオメトリを記録します: そうしないと、その後の失敗を元の資格レイアウトと比較できなくなります。
モデルのマッピング
モデルの決定は、ハウジング サイズの個人的な好みではなく、形状のボトルネックに従う必要があります。このトピックの基本的な推奨事項は、 MU30センサー は、長距離戦車のハードウェアよりも位置決めが容易でありながら、中距離戦車および一般的な設置ケースの最も広範なセットをカバーしているためです。
MU30: 一般的なジオメトリ主導の戦車配備の主な選択
MU30 は、アプリケーションが近距離の精度と長距離のサイロ測定の間に位置する場合にスクリーニングされる最初のモデルである必要があります。現在の製品ウィンドウは 200 ~ 6000 mm なので、設置に実際の幾何学的制約があるものの、専用の長距離プラットフォームを必要としない、多くのコンテナ、ビン、中程度の高さのタンクに適しています。また、これは、調達範囲を短くするか長くするかを決定する前に、調達が 1 つのベースライン見積もりを必要とする場合の合理的な参照モデルでもあります。
MU18: 狭いジオメトリが広い範囲に勝る場合に使用します
に移動 コンパクトな MU18 オプション 支配的な問題が近接取り付け、短いブラインドゾーンの要求、または狭いコンベア形状である場合。 MU18 は、単に MU30 の小型バージョンではありません。実際の展開では、コンパクトなレーン、浅いビン、使用できない領域に多くのスペースを与えることなくセンサーがターゲットの近くで動作する必要がある設置など、さまざまなジオメトリ クラスを解決します。
SR55: タンクの高さと拒否マージンが増加すると上に移動します
MU30 から に移動 SR55 タンクの高さが高くなると、取り付け距離が増加したり、側壁の拒絶問題が汎用のミッドレンジ レイアウトで快適に処理できるレベルよりも深刻になります。現在の SR55 ページは、IP68 保護と 280 ~ 4000 mm の範囲および 75 kHz クラスのトランスデューサを組み合わせており、形状がより専用レベルのアプリケーションに似てきた場合に適しています。コンテキストをサポートするには、次を使用します。 SR55 エンジニアリング ガイド.
UltraNova2: 保護されたコンパクトなインストールが主な制約である場合に使用します
選択してください ウルトラノヴァ2 プロジェクトで、古典的な円筒形のボディではなく、よりコンパクトで保護された、または表面指向の設置が必要な場合。これは、中距離の能力がまだ必要だが、密閉された機器や保護された屋外フレーム内で突き出たネジ付きセンサー本体による機械的ペナルティを軽減したい場合に特に役立ちます。
RFQ チェックリスト
サプライヤーに正しい形状を見積もってもらいたい場合は、RFQ で形状を直接説明する必要があります。ターゲット範囲と出力タイプのみを送信しないでください。インストール用封筒を送ります。
- 範囲: の最小、通常、最大作動距離。
- 環境: 塵、湿気、飛沫、温度変化、プロセス雰囲気。
- 出力インターフェース: スイッチング、アナログまたはデジタル。
- パワー: の供給ウィンドウとコネクタの期待値。
- 数量 + 納期: サンプル数量、パイロット数量、および予想される納品タイミング。
- タンク直径: 感知ゾーンの内部幅 。
- ノズル直径/高さ: には、スタンドパイプを使用する場合の凹部の深さとパイプの状態が含まれます。
- 最小測定可能レベル: 公称フルスケール範囲だけでなく、最も近い必要な点。
- コンベヤ幅: レーン幅、レール間隔、ベルト上のセンサーの高さ。
- ターゲットのサイズ/間隔: 最小の実際の物体であり、理想的な実験対象ではありません。
- 取り付け方向: トップダウン、サイドルック、埋め込み型、またはブラケット取り付け型。
商用コミュニケーションの場合、RFQ はコピーして貼り付けることができるほど単純ですが、ジオメトリのリスクをスクリーニングできるほど詳細なものにしてください。送信してください お問い合わせページ ジオメトリを直接レビューする必要がある場合。
RFQ スターターのコピー&ペースト
Application: Required range: Environment: Output interface: Power: Quantity: Lead-time: Tank diameter or conveyor width: Nozzle diameter / height or bracket stand-off: Minimum measurable level or smallest target size: Mounting orientation: Photos / sketches available: Yes / No
優れた RFQ では、サプライヤーに何が重要かを推測するよう求めません。これにより、ジオメトリが議論の最初のラウンドに強制的に組み込まれ、まさにそれが属する場所になります。
よくある質問
たとえ範囲が正しい場合でも、狭い水槽内では超音波センサーが故障するのはなぜですか?
この範囲は、センサーが検出できる距離のみを示しており、測定ウィンドウ全体にわたってビームが壁、ノズル、または蓋から隔離されたままであるかどうかを示すものではないためです。狭い水槽では、壁がエコー経路の一部になることがよくあります。
MU18 が MU30 よりも優れているのはいつですか?
MU18 は、コアの制約が近接取り付け、短めのブラインドゾーン要求、またはタイトなコンベア形状である場合に優れています。システムがコンパクトな廊下で動作する必要がある場合、追加のレンジヘッドルームよりも小さなフォームファクタの方が重要になる可能性があります。
購入者はいつ MU30 から SR55 に移行する必要がありますか?
取り付け距離、タンクの高さ、または必要な壁面除去マージンにより、アプリケーションが汎用 MU30 レイアウトの快適な形状の範囲を超えてしまう場合は、SR55 に移行してください。これは、より専用のタンク形状を使用した中距離レベルの作業で特に当てはまります。
壁との隙間はどれくらい必要ですか?
クリアランスはスタンドオフ距離、ターゲットの特性、実際の設置形状に依存するため、単一の普遍的な数値はありません。安全なルールは、紙の上でかろうじて許容できるレイアウトを認定するのではなく、中間範囲だけでなく最悪の場合の動作点でクリアランスを評価し、マージンを残すことです。
コンベアのサイド レールが誤検出を引き起こす可能性がありますか?
はい。レールは硬く、再現性のある反射板です。有効フットプリントが到達すると、特にターゲットが狭い、柔らかい、または位置が不安定な場合に、意図した製品よりも安定したエコーを生成できます。
サンプルテスト中に何を検証する必要がありますか?
最小および最大作動距離、最小の実際のターゲット、中心から外れている状態、取り付けの剛性、および近くの構造反射体を検証します。サンプルは、1 つの理想的な点だけでなく、実際の設置環境がテストされるまで認定されません。
フィルタリングで不正なジオメトリ レイアウトを解決できますか?
フィルタリングによって症状は軽減されますが、構造的なエコー パスの間違いを取り除くことはできません。壁、レール、またはノズルが有効な設置面積に繰り返し入る場合は、通常、パラメータ調整よりも機械的補正の方が効果的です。
RFQ の前に 2 回目のレビューを行いたいチームにとって、最も強力なワークフローはシンプルです。 センサー製品ハブ、周囲のジオメトリを比較します MU30, MU18, SR55、および ウルトラノヴァ2、次にジオメトリ パッケージを送信します。 連絡先 には、寸法、写真、実際の設置上の制約が記載されています。